|
I am a PhD student at the University of Washington advised by Professor Abhishek Gupta. My research is graciously supported by the NSF Graduate Research Fellowship. I'm work on embodied AI, with a focus on unlocking superhuman dexterity and robustness in robotics via large-scale RL. I am currently a part-time student researcher at Microsoft Research. Previously, I did my undergrad at UC Berkeley where I worked with Professors Sergey Levine and Kuan Fang in the Berkeley Artificial Intelligence Research (BAIR) Lab.
Email | CV | Scholar | Twitter | Github | CV of Failures | LinkedIn |

|
|
|
|
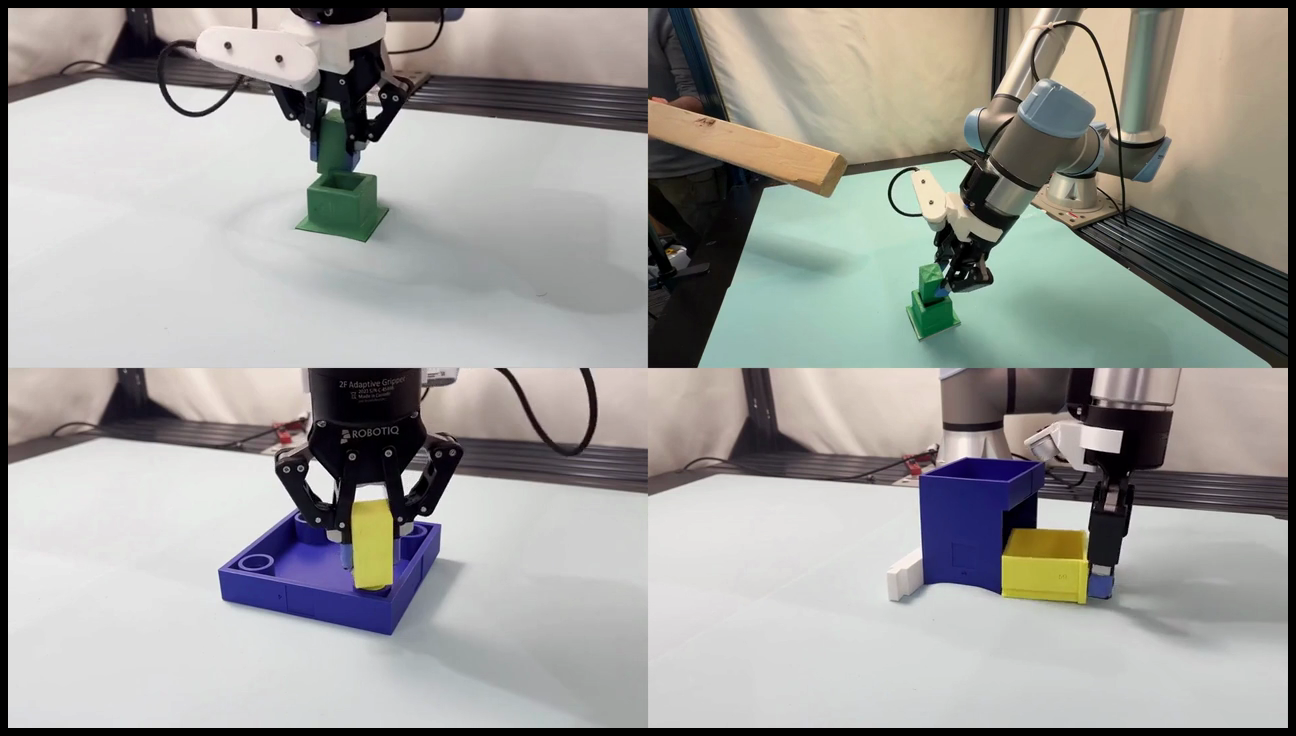
Patrick Yin*, Tyler Westenbroek*, Zhengyu Zhang, Joshua Tran, Ignacio Dagnino, Eeshani Shilamkar, Numfor Mbiziwo-Tiapo, Simran Bagaria, Xinlei Liu, Galen Mullins, Andrey Kolobov, Abhishek Gupta (* indicates equal contribution) ICLR 2026 project page / arXiv We leverage large-scale RL and diverse resets to solve dexterous, contact-rich manipulation tasks with no reward engineering or demos. We distill to RGB and show zero-shot sim2real transfer. |
|
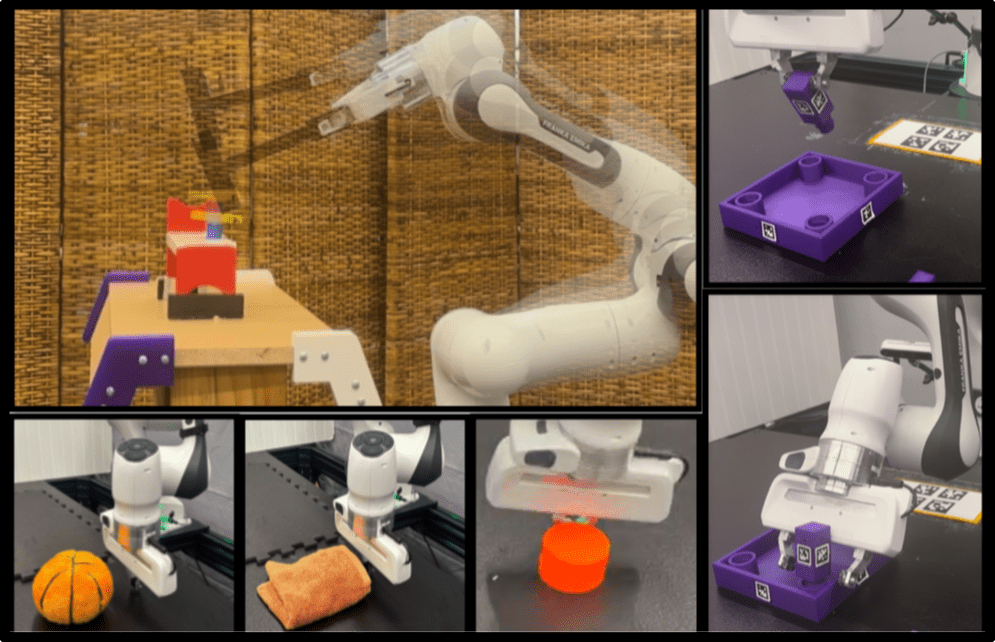
Patrick Yin*, Tyler Westenbroek*, Simran Bagaria, Kevin Huang, Ching-An Cheng, Andrey Kolobov, Abhishek Gupta (* indicates equal contribution) ICLR 2025 project page / arXiv We propose Simulation-Guided Fine-Tuning (SGFT) - a simple, general sim2real framework which extracts structured exploration priors from simulation to accelerate real world RL. |
|
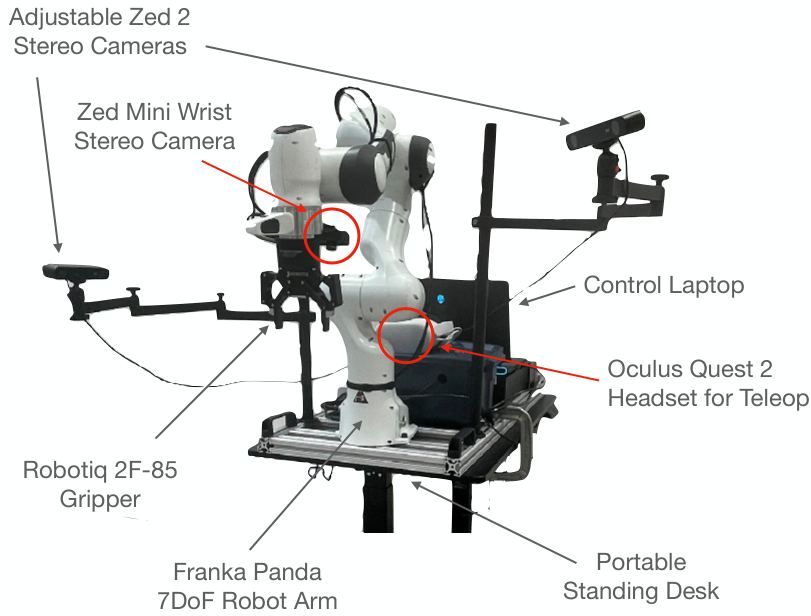
Alexander Khazatsky*, Karl Pertsch*, ..., Patrick Yin, ..., Sergey Levine, Chelsea Finn RSS 2024 project page / arXiv A large, diverse robot manipulation dataset with 76k demonstration trajectories. |
|
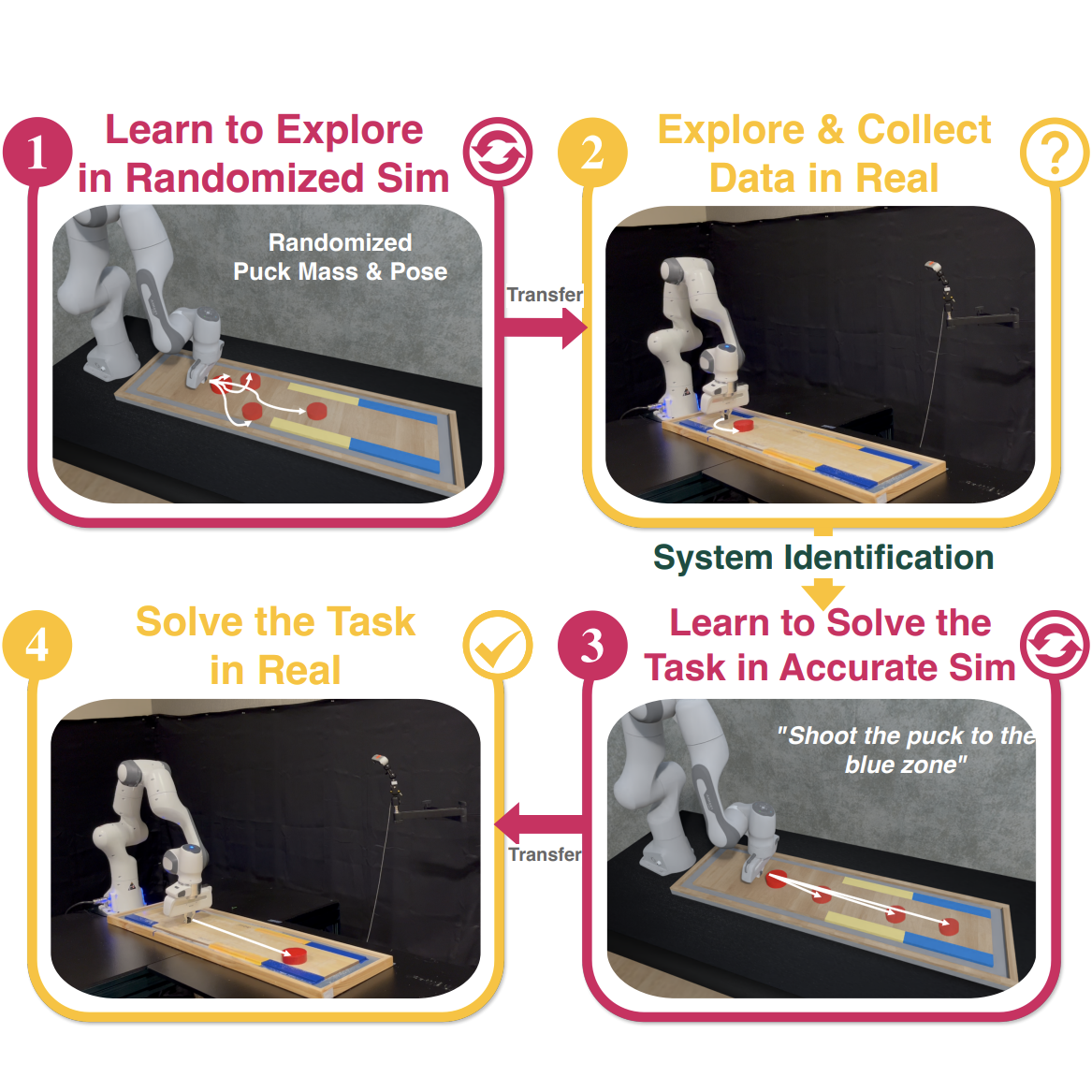
Marius Memmel, Chuning Zhu, Andrew Wagenmaker, Patrick Yin, Dieter Fox, Abhishek Gupta ICLR 2024 (Oral Presentation) project page / arXiv We propose a learning system that can leverage a small amount of real-world data to autonomously refine a simulation model, enabling sim-to-real transfer for real-world robotic manipulation tasks. |
|
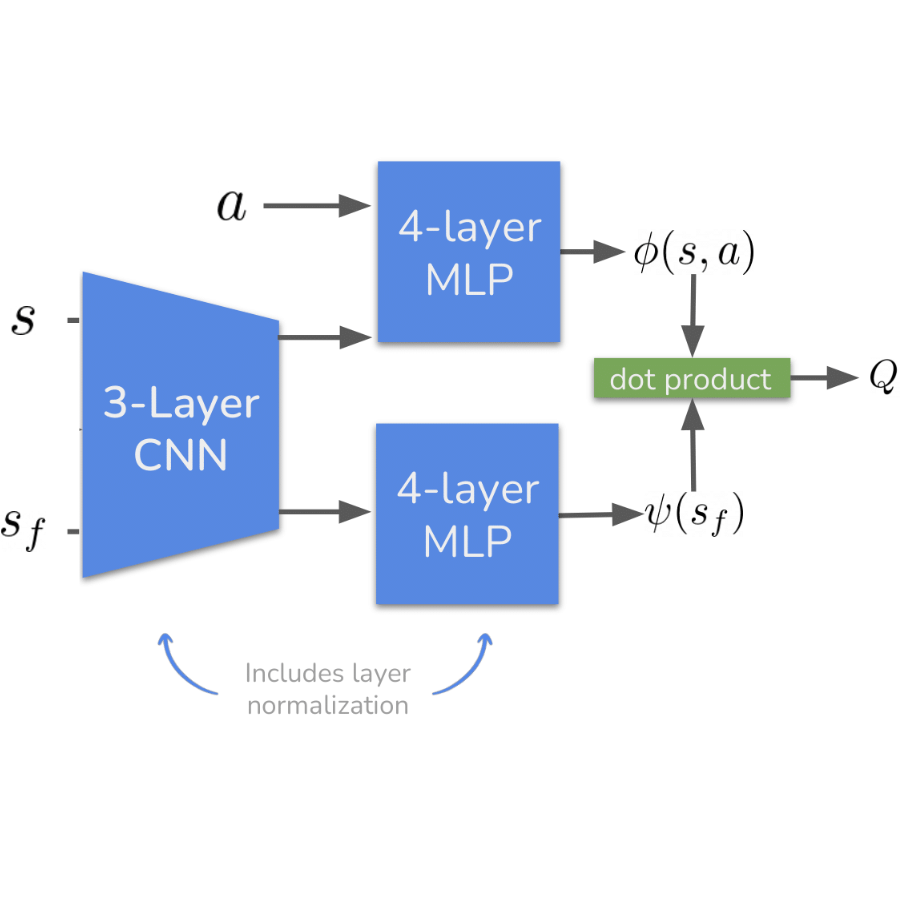
Chongyi Zheng, Benjamin Eysenbach, Homer Rich Walke, Patrick Yin, Kuan Fang, Ruslan Salakhutdinov, Sergey Levine ICLR 2024 (Spotlight Talk) project page / arXiv We discover that a shallow and wide architecture can boost the performance of contrastive RL approaches on simulated benchmarks. Additionally, we demonstrate that contrastive approaches can solve real-world robotic manipulation tasks. |
|
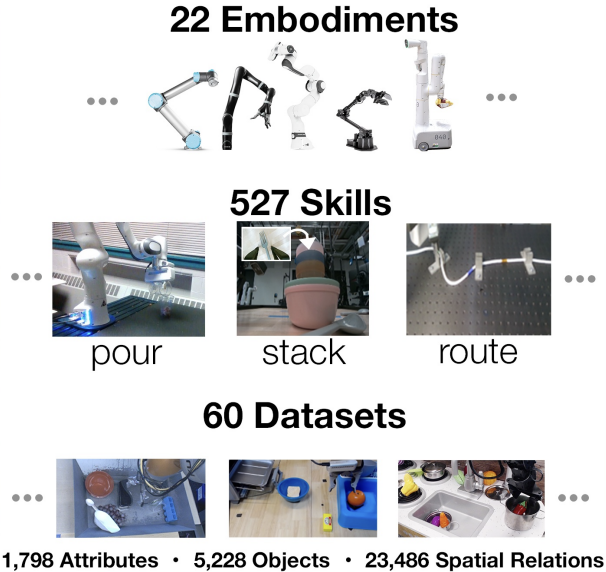
Open X-Embodiment Collaboration, ..., Patrick Yin, ... ICRA 2024 (Best Paper) project page / arXiv A large, open-source real robot dataset with 1M+ real robot trajectories spanning 22 robot embodiments, from single robot arms to bi-manual robots and quadrupeds. |
|
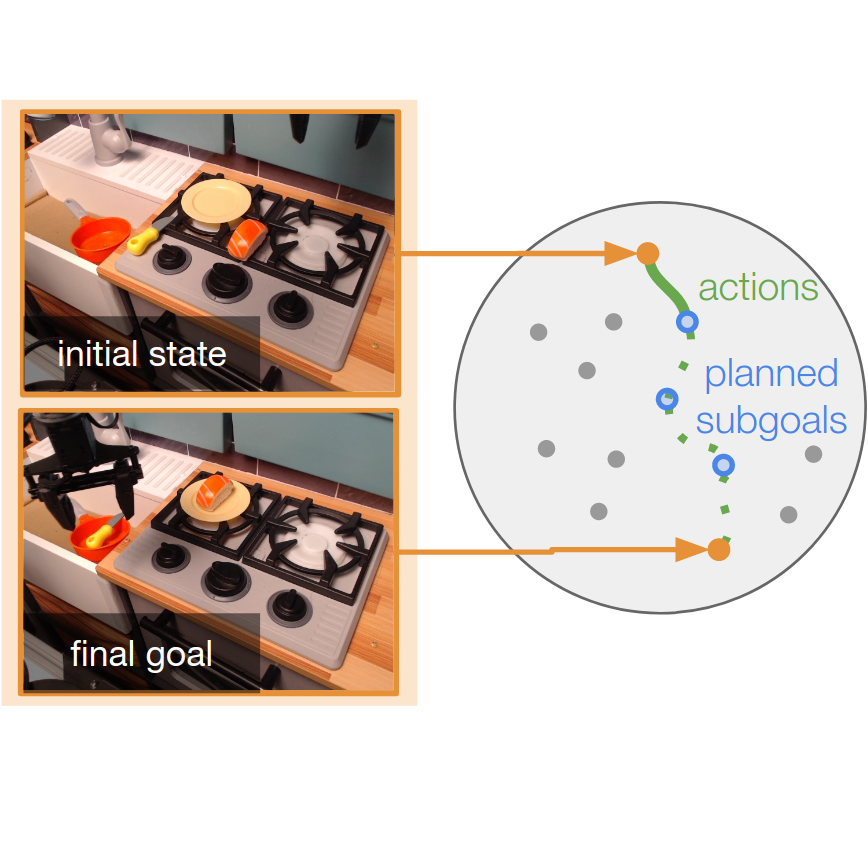
Kuan Fang, Patrick Yin, Ashvin Nair, Homer Rich Walke, Gengchan Yan, Sergey Levine CoRL 2022 (Oral Presentation) project page / arXiv We propose Fine-Tuning with Lossy Affordance Planner (FLAP), a framework that leverages diverse offline data for learning representations, goal-conditioned policies, and affordance models that enable rapid fine-tuning to new tasks in target scenes. |
|
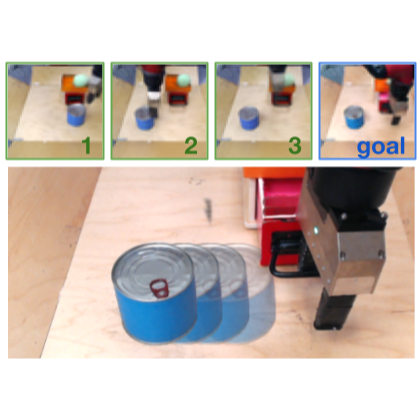
Kuan Fang*, Patrick Yin*, Ashvin Nair, Sergey Levine (* indicates equal contribution) IROS 2022 project page / arXiv We propose Planning to Practice (PTP), a method which makes it practical to train goal-conditioned policies for long-horizon tasks. |
|
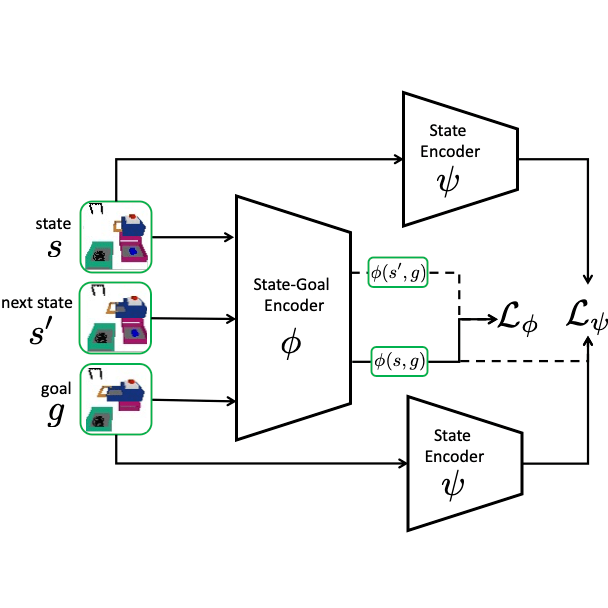
Philippe Hansen-Estruch, Amy Zhang, Ashvin Nair, Patrick Yin, Sergey Levine ICML 2022 project page / arXiv We propose a new form of state abstraction called goal-conditioned bisimulation that captures functional equivariance, allowing for the reuse of skills to achieve new goals in goal-conditioned reinforcement learning. |
|
|
|
Notes that I took on machine learning, math, and books during undergrad
Coursework that I took as an undergrad Coding projects from when I was first learning to code :) |
Website template from Jon Barron.